オピニオン
早稲田大学大学院 教授 橋本 健二 氏
【ヒューマノイドとAI】フィジカルAI時代のヒューマノイドとロボティクス基盤
- 投稿日時
- 2026/06/29 14:08
- 更新日時
- 2026/06/29 14:13
ロボット研究は大きな転換点にある。従来のロボットは、整った環境で決められた作業を高精度に繰り返すことを得意としてきた。だが人間の日常作業の多くは、対象の位置も形も環境も毎回変わり、状況に応じて身体を使い分ける必要がある。こうした「名も無い作業」は、従来技術だけでは容易に担わせられなかった。

早稲田大学大学院 情報生産システム研究科 教授 橋本 健二 氏
プロフィール
はしもと・けんじ 早稲田大学大学院情報生産システム研究科教授。2009年早稲田大学大学院理工学研究科博士後期課程修了、博士(工学)。日本学術振興会特別研究員,Collège de France-CNRS博士研究員,明治大学准教授などを経て現職。脚型ロボット、ヒューマノイド、移動ロボットの運動制御を専門とし、人間環境で活動するロボットの知能化と実環境応用に関する研究を進めている。一般社団法人京都ヒューマノイドアソシエーション(KyoHA)理事。
この壁を越える鍵として期待されるのが、AIとロボットを融合したフィジカルAIである。近年のAIは言葉や画像を扱うだけでなく、現実の状況を理解し行動を生成する方向へ進む。視覚・言語・行動を結ぶVLA(Vision-Language-Action)モデルや、映像から未来を予測する世界モデルは、ロボットに「何をすべきか」を理解させ「どう動くか」を生成させる新たな頭脳になり得る。
ただしAIが進歩すれば、直ちにロボットが人のように働けるわけではない。ロボットは物理空間で人や物に触れ、力を加え、失敗すれば破損や事故につながる。認識や計画だけでなく、安全性・信頼性・耐久性が不可欠であり、人間用の環境や道具を扱える身体が要る。AIの頭脳と身体をどう結ぶかが本質的な課題である。
ヒューマノイドの運動制御は、強化学習や、模擬環境で学んだ動きを実機へ移すSim-to-Real技術で大きく進んだ。筆者の研究室でも、突風下での安定歩行や不整地への適応を深層強化学習で実現している。一方、ロボットの「移動」がすでに解決済みであると見るのは早計である。車両への乗降、狭所を壁伝いに進む動作、転倒後に床や壁を支えに起き上がる動作では、足先だけでなく手・膝・肘・胴体を含む多点接触を扱う必要がある。
このとき、移動と作業は別問題ではない。四肢を大きな指と捉えれば、移動もまた環境に触れ、押し、支え、引っかける動作である。災害対応のために筆者らが開発した四肢ロボットWARE
C-1は、二足・四足歩行、腹ばい移動、垂直梯子の昇降を使い分け、手先のフックで作業も行う。移動と作業を地続きに捉えた身体である。ヒューマノイドには、全身で環境と関わりながら作業する力が求められる。
■データ量ではなく、学習可能な経験へ
フィジカルAIの開発では、実機データをどのように得て、学習可能な形に整えるかが性能を大きく左右する。米国は基盤モデルと計算資源で、中国は量産力と実証展開の速さで先行しており、日本が資金量や開発速度だけで同じ土俵で競うのは容易でない。しかし、単にデータを大量に集めればよいという発想には限界がある。膨大な走行データを蓄えた自動運転でさえ、完全な自律走行にはなお課題が残る。ロボットでも、接触・摩擦・変形・力加減・人との距離感など、量だけでは扱えない要素が多い。
重要なのは、何を経験として記録し、失敗をどう解釈し、構造化して学習に生かすかである。近年は、動画に含まれる人や物体の動き、接触のタイミングなどから、ロボットの行動生成に有用な情報を取り出す研究も進んでいる。筆者らも、こうした考え方を動画行動モデル(Video Action Model、VAM)として捉え、人の動きや実機での経験を、各ロボットの身体で実行可能な動作へ変換する研究に取り組んでいる。
やがてロボット自身が現場で試行錯誤し、失敗も含めてデータを集める段階に進む。そのとき、長時間安定して動き続ける身体がなければ、十分な経験も、安全な失敗の蓄積も得られない。ここに日本が果たし得る重要な役割がある。精密な機械設計、アクチュエータ、減速機、センサ、安全設計、品質管理、現場の改善力といった日本の強みは、「学習可能な実世界データを生み出し続けられる身体」を作る力につながる。重要なのは現場データを持つことではなく、質の高いデータを継続的に生む身体と実証環境を持つことである。
■KyoHAとSEIMEIが目指す循環
この文脈で、一般社団法人京都ヒューマノイドアソシエーション(KyoHA)の取り組みは重要な意味を持つ。KyoHAは、純国産ヒューマノイドの設計・試作・検証・改修のサイクルを国内で回し続ける枠組みである。検証機「SEIMEI」は、直ちに市場へ出す完成品というより、身体・センサ・制御・AIを統合し、実環境で検証するためのプラットフォームである。身体の設計や改修の自由度を自ら確保していてこそ、AIが学習の中で突き当たった限界を、次の身体の改良として反映できる。国内の部品技術やサプライチェーンを活用して実機を作り込むことは、単なる国産化にとどまらず、実機で得た知見を次の設計へ素早く戻す基盤にもなる。
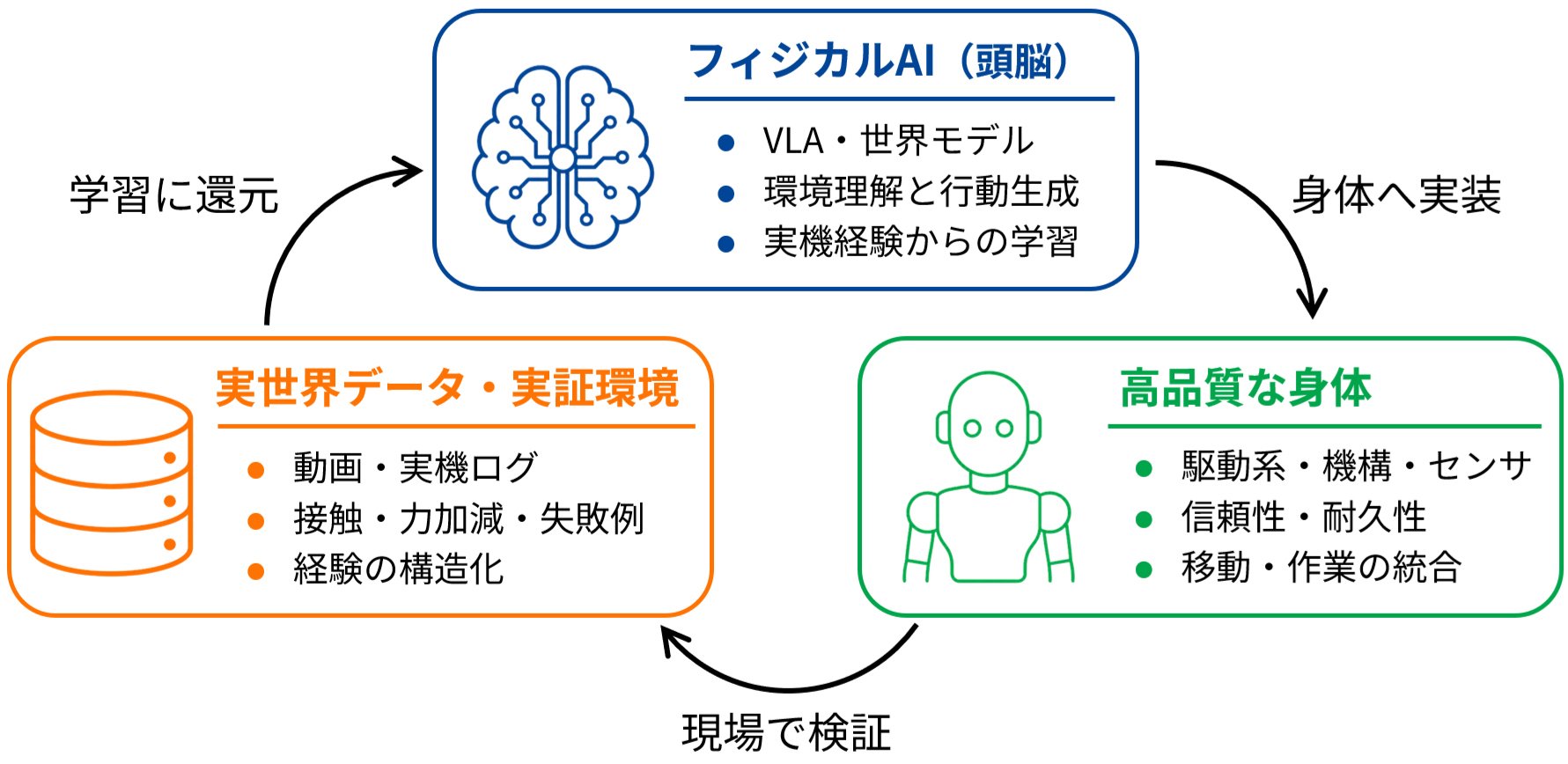
今後重要になるのは、AIモデルの性能単独でも、機械性能単独でもなく、AIと身体を実世界でどう統合し、進化させ続けるかである。高品質な身体、AIが学習可能な高品質なデータ、そして実機での検証と学習を繰り返す循環。この三つを結び付けることが、フィジカルAI時代のヒューマノイド開発を支える重要な基盤になると考えている。
(日本物流新聞2026年6月25日号掲載)