京セラが協働ロボを知能化、運用もフォロー
- 投稿日時
- 2024/11/13 18:00
- 更新日時
- 2024/11/13 16:01
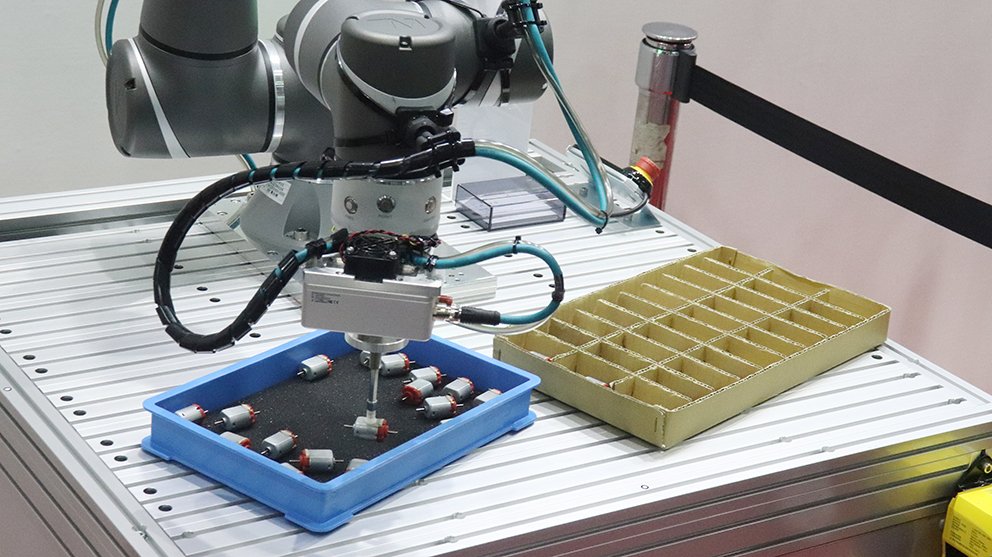
バラ積みピックの課題解決へ
トレーに乱雑に重なった光沢のある部品を、協働ロボットが1つずつ捉え、ワークの裏表も判別してコンベヤに並べる。ワークが取りづらい時は、アームに取り付けられたホウキで部品をかき混ぜて自ら作業しやすいよう場を整えるシーンも。この「人間くさい」と思えるほど柔軟なバラ積みピッキングシステムを提供するのは京セラだ。実は昨年から協働ロボットとAI、3Dビジョンでロボットを知能化する「京セラロボティックサービス」を展開。後発だが独自の付加価値で活躍の場を広げる。
同サービスはロボットと3Dカメラ、AIコントローラーで構成。サブスク契約の場合、AIコントローラーは常時クラウドプラットフォームに接続され、クラウドにはAI学習用のサービス基盤とロボットの運用管理基盤がある。AIモデルの生成や学習は導入後に発生したものも含めて京セラのエンジニアに任せることが可能だ。つまり同サービスは、ロボット導入後の運用面にかなり重きを置いている。

ロボティクス事業部・水上友介副事業部長(左)と同事業部事業開発チーム責任者の秋山卓也氏(右)
AIの進化でロボットを用いたバラ積みピッキングシステムは従前よりかなり普及した。「だがまだまだ課題がある」と京セラロボティクス事業部事業開発チーム責任者の秋山卓也氏は話す。立体物のバラ積みピッキングでは高価なカメラで対象の高精度な点群データを取得し、マッチングでワークを認識する方式が一般的。ただ光沢のある部品や黒い物、ごく小さなワークは点群データの取得が難しく、導入費用も高額になるのが難点だった。
これを同サービスは「独自のAI技術」(秋山氏)で解決する。京セラは、独自のAI技術ノウハウにより、2D(RGB)画像に対して高精度にワークを認識。さらにAI技術により高精度な点群情報を生成できるため、3Dカメラが取得する点群データのみに依存することなく、多様なワークにも対応。市場価格20万円程度の廉価なカメラでさまざまなワークをバラ積み状態から裏表も見分けながらハンドリングできるのだ。
変種変量生産に伴うワークの追加も、従前はロボットピッキングの課題だった。ワークの種類が増えたり周辺の光の具合が変われば都度学習が必要で、こうして発生する新ワークに対応したAIモデルの生成等の作業に、専門知識を持たない現場は対応できない。そこで同サービスはサブスク契約の場合、プランの範囲内でAIモデルの生成や再学習など導入後のフォローを同社エンジニアが行う。例えばAIモデル生成の場合、顧客はただワークを同社に送るだけでよい。
■UR社にも対応
「本来柔軟なはずのビジョンシステムなのに、現場に高いスキルが求められる」。同サービスを開発した秋山氏はこうした違和感を抱いていた。「運用後もサポートすることが知能化ロボを使い続けてもらうために重要ではないか」。この視点がサービスの骨格を形成した。
ところでなぜ同社がロボット事業に参入したのか。秋山氏は「グループ企業がMFP/プリンター製品で大量のモーターを制御している。クラウド構築やセキュリティサービスを手がけるグループ企業もある。関連会社にはAIの深層学習が得意なベンチャー企業も。つまり保有技術の統合で、一部、大学や外部企業の支援を受けながらも自らシステムを構築できた」と明かす。
同サービスはこれまでテックマン社の協働ロボットだけに対応していたが、10月にはユニバーサルロボット製への対応も始まった。秋山氏は「今後も対応メーカーを広げたい」と話す。
(日本物流新聞11月10日号掲載)

関連ニュース



関連動画

【NKE】軽量高出力エアチャック「Ultra Force(ウルトラフォース)シリーズ」〜日本初のシーケンスシリンダ機構
従来比約1/3の軽量化 軽く、小さく、エコに
NKE株式会社
2026年04月28日