

ATC付けたロボット切削、力分布見る「指」も
- 投稿日時
- 2024/10/08 14:27
- 更新日時
- 2024/10/10 17:55
Japan Robot Weekから
力のかかる加工や掴みにくいモノの把持にロボットが活用できそうだ。ロボットとその関連技術を一堂に集め、9月20日まで東京ビッグサイトで開かれたJapan Robot Week(日刊工業新聞社主催)でそんな提案が見られた。
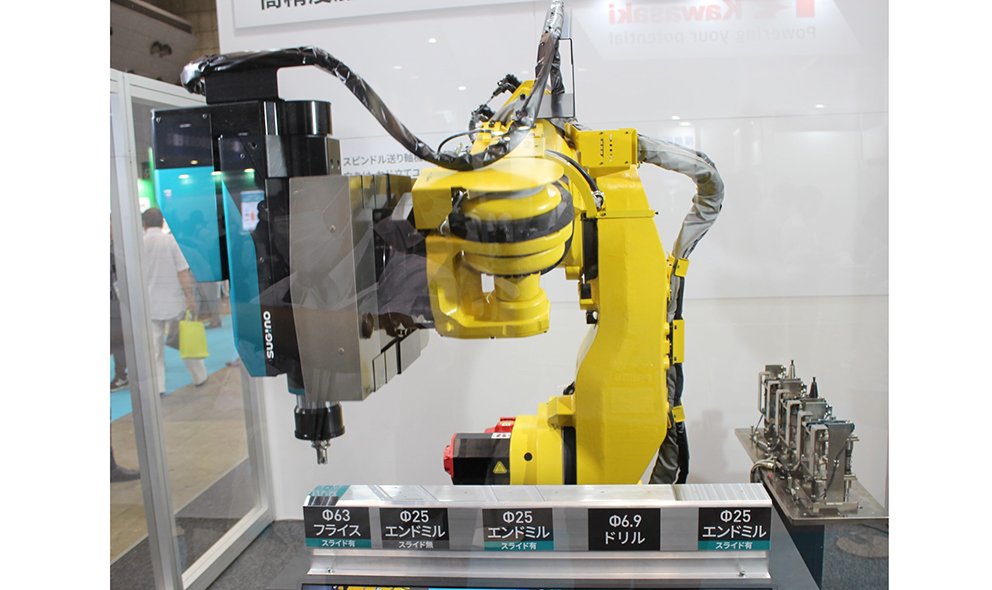
スギノマシンはロボットマシニングユニット「SELFEEDER DUO」シリーズに切削加工ができる「Robot Edition」を追加し、同展出展を機に受注を始めた。新製品はアームの先端にスピンドル・スライドユニットを取り付けて用いる。シリーズに穴あけやタップの機能はあったが、「2つの直行軸による高精度な切削を行うのは初めて。加工負荷を検知し加工条件を自動で切り替えるAFASと、ATCも用意した。これらがないとロボット切削は成り立たない」と言う。ロボットは姿勢を決めて位置決めまでを行い、高い動剛性と真直度をもつユニットが刃物の動きを担う。加工面の平面度はロボットのみの0.064㍉が0.011㍉に改善した(刃径16㍉エンドミル、毎分6000回転、送り毎分1500㍉)。ユニットは約800万円、ATCは1ステージ30万円前後の予定。
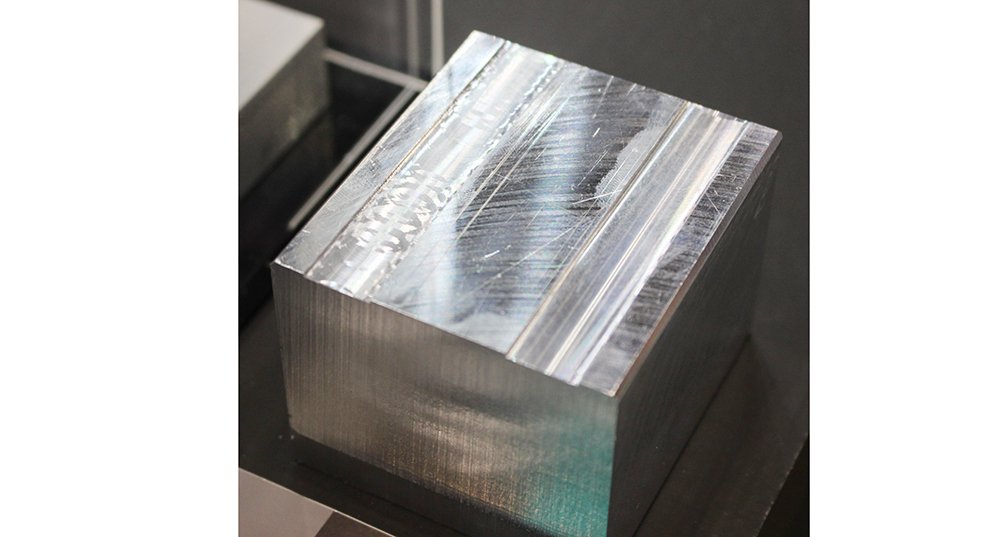
スギノマシン「Robot Edition」のスライドユニットを用いた刃径12㍉の加工面(右)と用いない加工面(左)
3社の連携体、TAFLINKはロボットを内蔵したバリ取りシステム「バリトリガー」を実演した。固定したベルトサンダーや振動ヤスリ、ブラシヘッドなどにアームが掴んだワークを押し当ててバリを取る。TAFLINKは11月14日から横浜市で開かれる日本ダイカスト展では大型のベルトサンダーの利用に特化した新製品を出品する。「ワーク把持型の進化版で、押し当てる力を細かくコントロールするエアーフローティング機構を搭載する」と予告する。
■力分布みる「指」、まさぐる「指」
「指」がハイテク化している。ロボットSIerのヤナギハラメカックスはスタートアップのFingerVision(東京都江東区)の指を使ってエリンギ茸を計量・整列できることを示した。黒点のついたシリコン製の指がモノを掴んだ際の凹みで力分布を見て柔軟物をやさしく扱う。と同時に3Dビジョンで1つひとつの質量も±5%ほどの精度で把握できる。「指は防水性もあわせ持つので、協働ロボットと組み合わせて給食センターや果物のケース詰めなどに応用できないかと考えている」と言う。
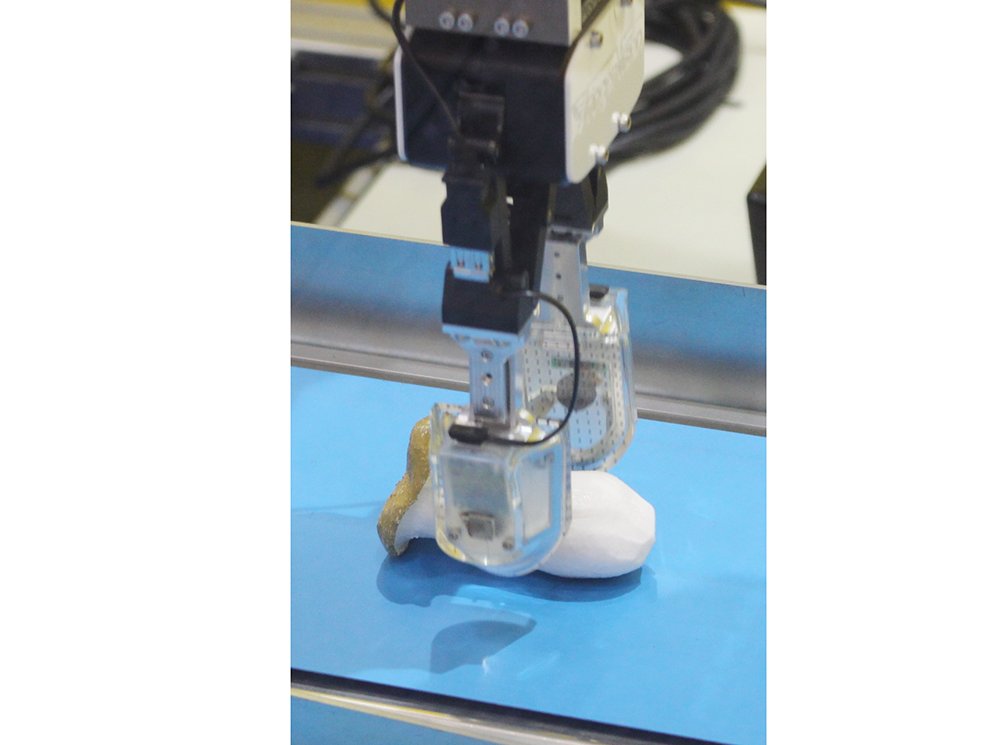
ヤナギハラメカックスは把持する際の凹みで力分布を見てエリンギ茸をやさしく扱って見せた。
大阪大学発のベンチャー、Thinkerはカワダロボティクスのヒト型協働ロボット「NEXTAGE」のアーム先端にカメラ不要のロボットハンド「Think Hand Fシリーズ」を付けた。赤外線とAIを組み合わせた「近接覚センサー」でモノの位置と形を非接触で把握する。ネジが詰まった箱から指先でまさぐりながら1本ずつピッキングし、小袋に入れて見せた。赤外線を使うことで、ロボットが苦手とする鏡面・透明物の取扱いも可能という。
(日本物流新聞10月10日号掲載)



関連動画



【iREX2025】ライブ配信「注目!最新ヒューマノイド」国際ロボット展2025会場から
国際ロボット展(iREX)2025会場からライブ配信! 最新ヒューマノイドの見どころやイチ押し製品の紹介をたっぷりとお届けします。
Mono Que
2025年12月04日
