オピニオン
KyoHA 理事 橋本 健二 氏
国産ヒューマノイド開発を京都の地から
- 投稿日時
- 2026/03/24 14:04
- 更新日時
- 2026/03/24 14:58
「和」の力で国産ヒューマノイドを
日本ロボティクスを再統合
早稲田大学、テムザック、村田製作所、SREホールディングスなどが参画する一般社団法人「KyoHA(京都ヒューマノイドアソシエーション)」が、国産ヒューマノイドロボットの開発に乗り出した。2026年4月ごろに初期プロトタイプを公開する予定だ。KyoHA理事で早稲田大学大学院情報生産システム研究科教授の橋本健二氏に、開発の狙いや日本独自のアプローチについて聞いた。
――KyoHA設立の目的と、京都を拠点とした理由は。
「モーターや減速機など、日本企業はロボットの要素技術では依然として世界トップレベルの競争力を持っています。これらをヒューマノイドというプラットフォームを通じて再統合し、日本のロボティクス産業の強みをもう一度結び直すことが目的です」
「テムザックや村田製作所など、コア技術を担う企業が京都に拠点を置いていることも大きい。ロボット産業は首都圏中心で動きがちですが、実際のモノづくりの強みは地方にあります。地方発のロボット産業という意味でも、京都を拠点にしたいと考えました」
「ヒューマノイド開発はF1のような位置づけでもあります。F1マシン自体は販売しませんが、そこから得られた技術が市販車に転用されます。ヒューマノイド開発で得られた知見を各社にフィードバックすることで、日本企業の競争力全体を高めることも狙っています」
――海外勢との差をどう埋める。
「欧米や中国は垂直統合型で開発するケースが多いですが、KyoHAは異なる技術を持つ企業が対等な立場で協働する『和』の力を原動力にしています」
「日本は安全性を重視するあまり、サービスロボットの普及では慎重になりすぎた側面があります。例えばロボットの安全性をどのように評価するのか、といった議論です。そうした議論が続く中で、中国が市場を先行しました。ただヒューマノイドが社会実装される段階では安全規格の議論も必ず出てきます。その際に発言権を持つためにも、日本として自力でヒューマノイドを開発しておく必要があります」
――AIとの融合はどのように進む。
「AIの進化とは両輪になります。現在はLLM(大規模言語モデル)やVLM(視覚言語モデル)が注目されていますが、ロボットではそれを動作に結び付けるロボット基盤モデルが必要になります。視覚や言語情報からロボットの行動を生成するVLA(Vision-Language-Action)と呼ばれる領域です」
「ロボットは物理世界と接触する存在ですから、視覚や言語だけでなく、触覚や聴覚などのセンサー情報も統合したAIが重要になります。例えば災害対応ロボットでは、被害者の声や異臭など、複数の感覚を統合して状況を判断します。人間が現場で働かせる『第六感』に近い能力をAIで再現することも将来的には可能になるでしょう」
■京都の伝統産業と融合も
――ヒューマノイドは可搬重量が小さいと指摘される。
「ロボットは一般にシリアルリンク構造で、関節の根元に近いほどモーター負荷が大きくなります。これをパラレルリンク機構にすることで負荷を分散できます。機構設計とモーター制御を組み合わせれば、自重以上のパワーを発揮することも可能です」
また従来のロボットは身体同士が接触しないように制御されていましたが、人間は脇を締めたり体を添えたりして力を分散させます。こうした身体接触を運動生成に取り込むことも重要になります」
――京都の伝統産業との融合の可能性は。
「既存のロボット基盤モデルでは、伝統工芸や伝統芸能の動きを視覚的に模倣するところまでが中心です。しかし触覚や力覚を含めたAIモデルと、関節や重心制御の技術が組み合わされれば、職人の身体技術そのものを再現できる可能性があります。京都に限らず各地地方に拠点を設け、伝統産業・芸能の身体技術をデータ化してクラウドに集約する。いわばフィジカルAIの『産地化』のようなモデルも考えられます」
「また京都の組み紐技術を応用した空気圧人工筋肉があります。これをパワースーツのような形でヒューマノイドの補助機構に利用するなど、伝統技術との融合の可能性もあります」
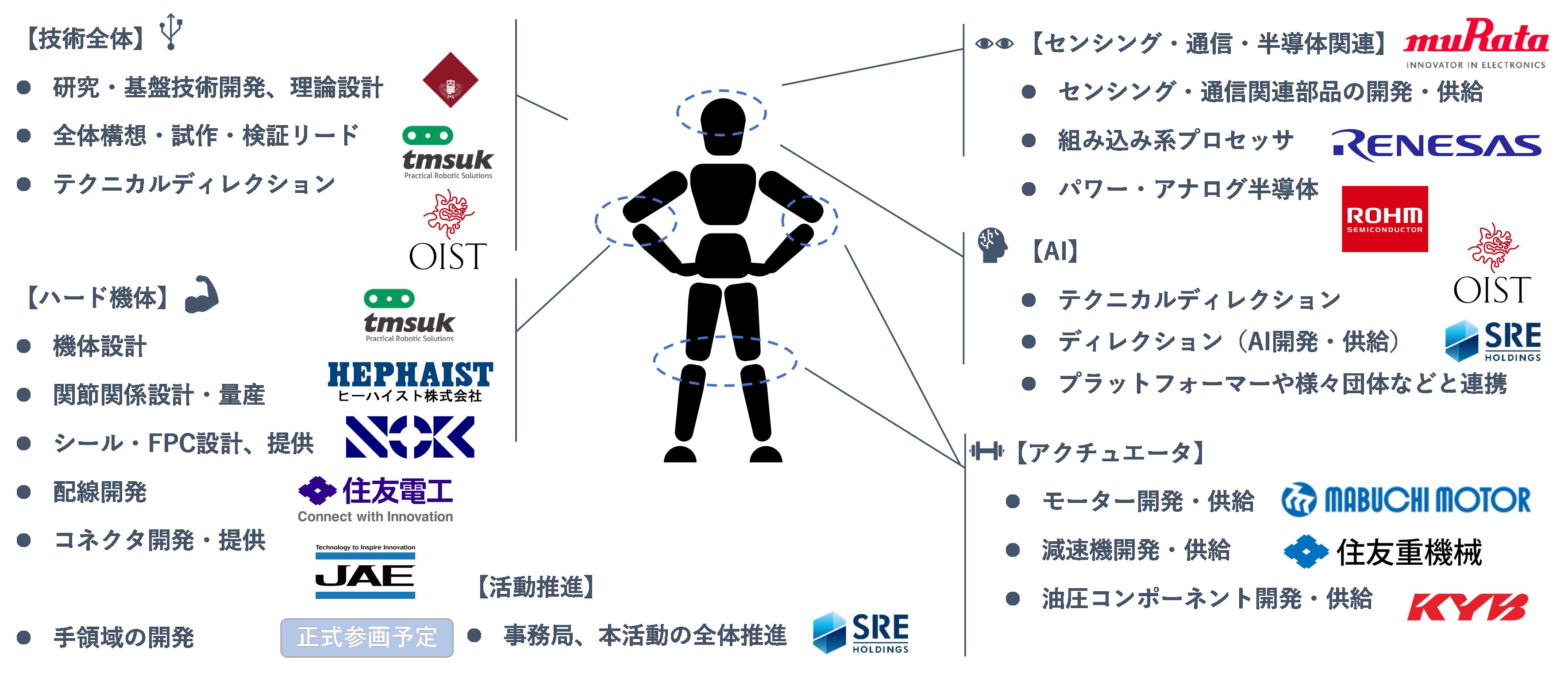
参画企業とヒューマノイドに対する役割
MOMAじゃだめ?
なぜヒューマノイドじゃないといけないのか。昔から散々言われてきてそれで研究をやめた人も多いと橋本氏は苦笑する。
「災害現場では、重機のように上から下へ力を加える機械では対応できない場面があります。人間はジャッキを使ったり、下から抱え上げたりして作業します。こうした作業はヒューマノイドでなければ代替できません」
(日本物流新聞2026年3月25日号掲載)