連載
ジダイノベーター Vol.16/「近接覚センサ」でロボットの指を知能化
- 投稿日時
- 2023/08/10 10:32
- 更新日時
- 2023/08/10 10:38
Thinker、透明物も鏡面も柔らかい物もハンドリング
カメラを用いた視覚センサやヒトの指の感覚を模した触覚センサが広く普及した。ロボットができることも飛躍的に増えたが、まだ万能とは言えないだろう。例えばカメラは透明物や鏡面体を認識できず、触覚センサは野菜などの柔らかい物を検知する前に傷つけてしまう。さらなる普及のためには、視覚でも触覚でもない新たな感覚をロボットに与える必要がある。
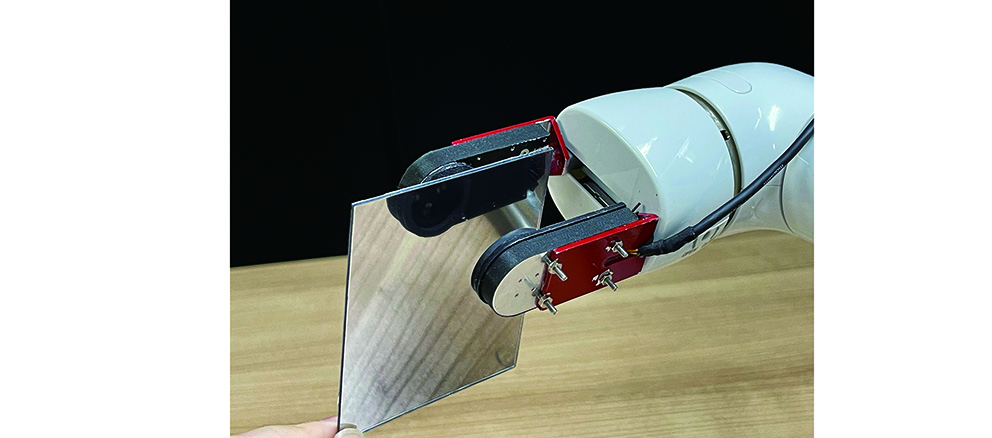
近接覚センサをハンドに取り付ければ鏡面体も掴める
Thinkerは、この課題に真っ向から挑む大阪大学発のスタートアップだ。ごく近い距離の物体を非接触で計測する「近接覚センサ」を開発し、税別22万円で7月末に発売した。赤外線とAIを使うこのセンサが司るのは、ヒトの五感にはない新たな感覚だ。AIを小さな基板で動かせる手軽さもあり、発表されるやロボットSIerなどから多くの引き合いを集めている。
近接覚センサの構造はシンプルだ。薄さ2・5㍉、長辺55㍉の基板上に発光素子と受光素子があり、赤外線の反射量からAIでワークの距離と傾きを割り出す。計測範囲は1・5~20㍉と短いが、計測スピードは5msecと1秒に約200回もの計測が可能。至近の物を早く正しく捉えるのに長けており、ロボットハンドに取り付ければワークの動きに高速で追従できる。
「(近接覚センサなら)ガラスなどの透明物や鏡面体も掴むことができ、カメラが苦手な外乱光にも左右されにくい」と同社の中野基輝CTO。さらに触覚センサが苦手な柔らかい物を設定した力で傷つけず掴めるメリットもある。センサで正確な距離と角度を測れるためティーチングもラフで済む。これがSIerの注目を集めるゆえんだろう。
■手の平サイズの基板で動くAI
特長の多い近接覚センサだが、これまで光センサはロボット業界では用途が限られていた。理由は技術的な壁だ。センサ側では、反射の少なさがワークの傾きゆえか素材の反射率ゆえかを見分けられない。しかし対策にセンサを増やしても、反射量とワークの傾きが綺麗な相関関係にない(グラフが歪んだ曲線を描く)ため、演算が複雑化し数理モデルを組むのが難しいのだ。
これをThinkerは「独自のAIで反射量と傾きの関係が単純な線形データであるかのように抽象化する」(中野氏)ことで解決した。現場で複雑な演算をせずとも角度を割り出せるため、AIを小さな基板で動かせる。結果として画像処理にリッチなPCを要求するカメラシステムより導入費を抑えられ、自動化の門戸を大手以外にも広げられるわけだ。
発表から間もない近接覚センサだが、中野氏は少なからぬ手ごたえを感じている。「透明な部品は車にも家電にも内蔵されるが、それらは今のところ主に人手で扱われている。光沢ある金属もカメラは苦手で、日光で誤作動するため我々に相談が来ることもある。柔らかい野菜も吸着や爪では痕が付くため、価値を棄損せずに掴める近接覚センサに引き合いが寄せられている」(同氏)。もちろん、これは同社に届く相談事のほんの一端だ。
近接覚センサはロボット向けに実用化されてこなかった新しいセンサ。それだけに、同社が想定していた以外の用途を模索するユーザーも多いそうだ。「まずは触ってほしい」と中野氏。ユーザーと二人三脚で新たな需要の開拓を目指す。
中野基輝CTO。近接覚センサ(左)とAI基板(右)を手に
(2023年8月10日号掲載)